
















About my Project
¡Madre mía! Entre el cambio de hora reciente y que los días aquí ya eran cortos... ¡ahora anochece a las 5! Apenas puedes disfrutar la tarde. Es muy triste... pero no por ello me vengo abajo. Ahora es cuando más atareado estoy con el proyecto, y de eso quería hablar hoy. He tardado prácticamente un mes en elegirlo y creo que no podía haber elegido otro mejor... Os cuento:
Llegué a la universidad con Javi (el otro alumno erasmus de la Etsii) sin tener nada asignado. Lo primero que tuvimos que hacer fue localizar al coordinador de relaciones internacionales del departamento de 'Electrical, Electronic and Computer Engineering'. Parecía fácil pero gastamos casi 4 días acudiendo a su despacho (incluso 3 veces algún día) hasta que por fin un día lo encontramos. Nos comentó que aquí es usual enviar mails a los profesores para concertar una cita con ellos (No comprendo por qué no facilitan horarios de tutorías...) y por fin nos proporcionó una lista de posibles profesores (aquí se les llama lecturers) que podían tutelar proyectos.
Dicho y hecho, comenzamos a preguntar uno por uno qué ofertaban (Hablamos entre otros con Trucco, cuyo libro citaban en 'Modelos de Inteligencia Artificial'). A grandes rasgos los trabajos disponibles que ofrecían consistían en: manipulación de rasgos de imágenes, procesamiento de la voz, diseño y programación de un robot submarino, tratamiento de videoconferencias, análisis de patrones de movimiento humano u operaciones gráficas con secuencias de moléculas. La verdad es que todos parecían bastante suculentos pero lo tuvimos claro desde el principio... ¡queríamos el del robot submarino!
La idea global que teníamos al principio sobre el proyecto nos motivaba... diseñar un vehículo submarino y programarle inteligencia artificial para que desempeñara de forma autónoma sus funciones. Tras comunicarle al tutor nuestra intención de tomar parte en el proyecto, nos contó que íbamos a participar en la 'Student Autonomous Underwater Challenge - Europe (SAUC-E)', es decir, una competición a nivel europeo entre robot submarinos, en la que el equipo vencedor ganará ¡5000 libras de premio!. Se celebra en Pinewood Movie Studios, en Londres a mediados de Julio del 2006. Al parecer esta será la primera edición del campeonato europeo y es probable que asistan ojeadores de empresas. La competición la patrocina el ministerio de defensa de UK. No quiero ni pensar los posibles fines que pueden desear con los robot submarinos... Las reglas son sencillas. Los robots tienen que completar varias misiones consistentes en: 1) Cruzar una puerta de partida. 2) Localizar y tocar unos objetivos a profundidad media de la piscina. 3) Localizar y soltar marcas sobre objetivos en el fondo. 4) Alcanzar una zona de salvación. Todo ello de forma autónoma, sin ayuda externa y sin saber a priori las medidas de la piscina ni la zona en la que comienzan.
es decir, una competición a nivel europeo entre robot submarinos, en la que el equipo vencedor ganará ¡5000 libras de premio!. Se celebra en Pinewood Movie Studios, en Londres a mediados de Julio del 2006. Al parecer esta será la primera edición del campeonato europeo y es probable que asistan ojeadores de empresas. La competición la patrocina el ministerio de defensa de UK. No quiero ni pensar los posibles fines que pueden desear con los robot submarinos... Las reglas son sencillas. Los robots tienen que completar varias misiones consistentes en: 1) Cruzar una puerta de partida. 2) Localizar y tocar unos objetivos a profundidad media de la piscina. 3) Localizar y soltar marcas sobre objetivos en el fondo. 4) Alcanzar una zona de salvación. Todo ello de forma autónoma, sin ayuda externa y sin saber a priori las medidas de la piscina ni la zona en la que comienzan.
Nos enteramos después de que este tipo de eventos ya existían en USA. Vimos un dvd con videos de las competiciones similares(AUVSI). Allí ya van por la 8ª... y vaya flipada ver a los equipos reparando y probando sus cacharros acuáticos. Esto nos animó un montón a empezar.
Lo primero fue comprobar cómo avanzaba el diseño de nuestro submarino. Para nuestra sorpresa ya estaba prácticamente terminada la parte hardware. El robot ya estaba montado; disponía de un microcontrolador, un disco duro de 20 GB con Linux instalado, 4 motores,
Para nuestra sorpresa ya estaba prácticamente terminada la parte hardware. El robot ya estaba montado; disponía de un microcontrolador, un disco duro de 20 GB con Linux instalado, 4 motores,
altímetro, sónar, INS, medidor de aceleración y 2 cámaras. De momento se puede controlar manualmente para que ascienda/descienda, avance/retroceda y mida la angulación. Pongo algunas fotos donde se contempla funcionando en la pecera gigante del laboratorio.
Conocimos más tarde al resto del equipo: 3 franceses y 2 escoceses. 3 de ellos encargados de la parte de mecánica, robótica y hardware y el resto de la parte software (que apenas se había comenzado). A raíz de presentarnos, el tutor se desentendió, nos dijo que el resto era cosa nuestra; Que teníamos la documentación de todos los sensores para probarlos, programarlos e incluso solicitar nuevo material (que para algo tenemos unos sponsors) y que confiaba en nuestro buen criterio... Así que el resto de semanas hasta hoy hemos estado quedando los miembros del grupo para contabilizar y distribuir el trabajo. Es bastante frustrante comprobar que Javi y yo, los españoles, somos los que peor nivel de inglés tenemos. A los franceses se les nota sueltos hablando y se les comprende; pero cuando abren la boca los escoceses, nos perdemos por completo. Muchas veces sueltan algo que parece un chiste, porque veo que todos ríen y no puedo menos que sonreír para no parecer descortés.
Que teníamos la documentación de todos los sensores para probarlos, programarlos e incluso solicitar nuevo material (que para algo tenemos unos sponsors) y que confiaba en nuestro buen criterio... Así que el resto de semanas hasta hoy hemos estado quedando los miembros del grupo para contabilizar y distribuir el trabajo. Es bastante frustrante comprobar que Javi y yo, los españoles, somos los que peor nivel de inglés tenemos. A los franceses se les nota sueltos hablando y se les comprende; pero cuando abren la boca los escoceses, nos perdemos por completo. Muchas veces sueltan algo que parece un chiste, porque veo que todos ríen y no puedo menos que sonreír para no parecer descortés.
De momento por fin empiezo a vislumbrar cuáles serán mis menesteres en el equipo. Aparte de programar la inteligencia artificial y el plan de la misión, en principio me estoy dedicando a realizar un análisis de los sensores implicados en el autopiloto del robot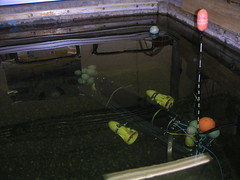 y programar el sónar para obtener imágenes con fronteras nítidas susceptibles de ser procesadas posteriormente para obtener información del medio; por ejemplo, a raíz de la imagen capturada por el sónar, detectar las esquinas de la piscina y dibujar una matriz con el mapa y las coordenadas (Si tuviéramos Matlab sería una maravilla, pero de momento tendré que investigar y buscar librerias para programar el sónar en C++ en Linux). Estoy completamente aterrorizado con el dichoso sónar. Resulta que el aparato vale ni más ni menos que 10000 libras (15000 euros), así que comprended la precaución y el miedo que me causa manipularlo...
y programar el sónar para obtener imágenes con fronteras nítidas susceptibles de ser procesadas posteriormente para obtener información del medio; por ejemplo, a raíz de la imagen capturada por el sónar, detectar las esquinas de la piscina y dibujar una matriz con el mapa y las coordenadas (Si tuviéramos Matlab sería una maravilla, pero de momento tendré que investigar y buscar librerias para programar el sónar en C++ en Linux). Estoy completamente aterrorizado con el dichoso sónar. Resulta que el aparato vale ni más ni menos que 10000 libras (15000 euros), así que comprended la precaución y el miedo que me causa manipularlo...
Y como no podía ser de otra manera, hoy por fin recibimos una lección de seguridad en el laboratorio. Aprendimos entre otras cosas a no situar los portátiles cerca de la pecera, a no ir vestidos con pantalones cortos ni con zandalias (te puedes quemar si se cae un soldador de alguna mesa) o a tener cuidado con las esquinas de los hierros del robot... En fin...
Y eso es todo, aquí sigo trabajando, investigando sobre el sónar y rezando por entender a los escoceses...
¡Nos vemos!
es decir, una competición a nivel europeo entre robot submarinos, en la que el equipo vencedor ganará ¡5000 libras de premio!. Se celebra en Pinewood Movie Studios, en Londres a mediados de Julio del 2006. Al parecer esta será la primera edición del campeonato europeo y es probable que asistan ojeadores de empresas. La competición la patrocina el ministerio de defensa de UK. No quiero ni pensar los posibles fines que pueden desear con los robot submarinos... Las reglas son sencillas. Los robots tienen que completar varias misiones consistentes en: 1) Cruzar una puerta de partida. 2) Localizar y tocar unos objetivos a profundidad media de la piscina. 3) Localizar y soltar marcas sobre objetivos en el fondo. 4) Alcanzar una zona de salvación. Todo ello de forma autónoma, sin ayuda externa y sin saber a priori las medidas de la piscina ni la zona en la que comienzan.Nos enteramos después de que este tipo de eventos ya existían en USA. Vimos un dvd con videos de las competiciones similares(AUVSI). Allí ya van por la 8ª... y vaya flipada ver a los equipos reparando y probando sus cacharros acuáticos. Esto nos animó un montón a empezar.
Lo primero fue comprobar cómo avanzaba el diseño de nuestro submarino.
Para nuestra sorpresa ya estaba prácticamente terminada la parte hardware. El robot ya estaba montado; disponía de un microcontrolador, un disco duro de 20 GB con Linux instalado, 4 motores,altímetro, sónar, INS, medidor de aceleración y 2 cámaras. De momento se puede controlar manualmente para que ascienda/descienda, avance/retroceda y mida la angulación. Pongo algunas fotos donde se contempla funcionando en la pecera gigante del laboratorio.
Conocimos más tarde al resto del equipo: 3 franceses y 2 escoceses. 3 de ellos encargados de la parte de mecánica, robótica y hardware y el resto de la parte software (que apenas se había comenzado). A raíz de presentarnos, el tutor se desentendió, nos dijo que el resto era cosa nuestra;
Que teníamos la documentación de todos los sensores para probarlos, programarlos e incluso solicitar nuevo material (que para algo tenemos unos sponsors) y que confiaba en nuestro buen criterio... Así que el resto de semanas hasta hoy hemos estado quedando los miembros del grupo para contabilizar y distribuir el trabajo. Es bastante frustrante comprobar que Javi y yo, los españoles, somos los que peor nivel de inglés tenemos. A los franceses se les nota sueltos hablando y se les comprende; pero cuando abren la boca los escoceses, nos perdemos por completo. Muchas veces sueltan algo que parece un chiste, porque veo que todos ríen y no puedo menos que sonreír para no parecer descortés.De momento por fin empiezo a vislumbrar cuáles serán mis menesteres en el equipo. Aparte de programar la inteligencia artificial y el plan de la misión, en principio me estoy dedicando a realizar un análisis de los sensores implicados en el autopiloto del robot
y programar el sónar para obtener imágenes con fronteras nítidas susceptibles de ser procesadas posteriormente para obtener información del medio; por ejemplo, a raíz de la imagen capturada por el sónar, detectar las esquinas de la piscina y dibujar una matriz con el mapa y las coordenadas (Si tuviéramos Matlab sería una maravilla, pero de momento tendré que investigar y buscar librerias para programar el sónar en C++ en Linux). Estoy completamente aterrorizado con el dichoso sónar. Resulta que el aparato vale ni más ni menos que 10000 libras (15000 euros), así que comprended la precaución y el miedo que me causa manipularlo...Y como no podía ser de otra manera, hoy por fin recibimos una lección de seguridad en el laboratorio. Aprendimos entre otras cosas a no situar los portátiles cerca de la pecera, a no ir vestidos con pantalones cortos ni con zandalias (te puedes quemar si se cae un soldador de alguna mesa) o a tener cuidado con las esquinas de los hierros del robot... En fin...
Y eso es todo, aquí sigo trabajando, investigando sobre el sónar y rezando por entender a los escoceses...
¡Nos vemos!
